En un contexto donde la industria evoluciona rápidamente, la forma en que producimos y trabajamos está siendo transformada por avances tecnológicos que permiten integrar inteligencia artificial, robótica avanzada y conectividad en cada etapa del proceso productivo. Sin embargo, la Industria 5.0 va más allá, colocando al ser humano en el centro de esta evolución y enfatizando valores como la sostenibilidad, la personalización y la colaboración entre máquinas y personas.
¿Qué es la Industria 5.0?
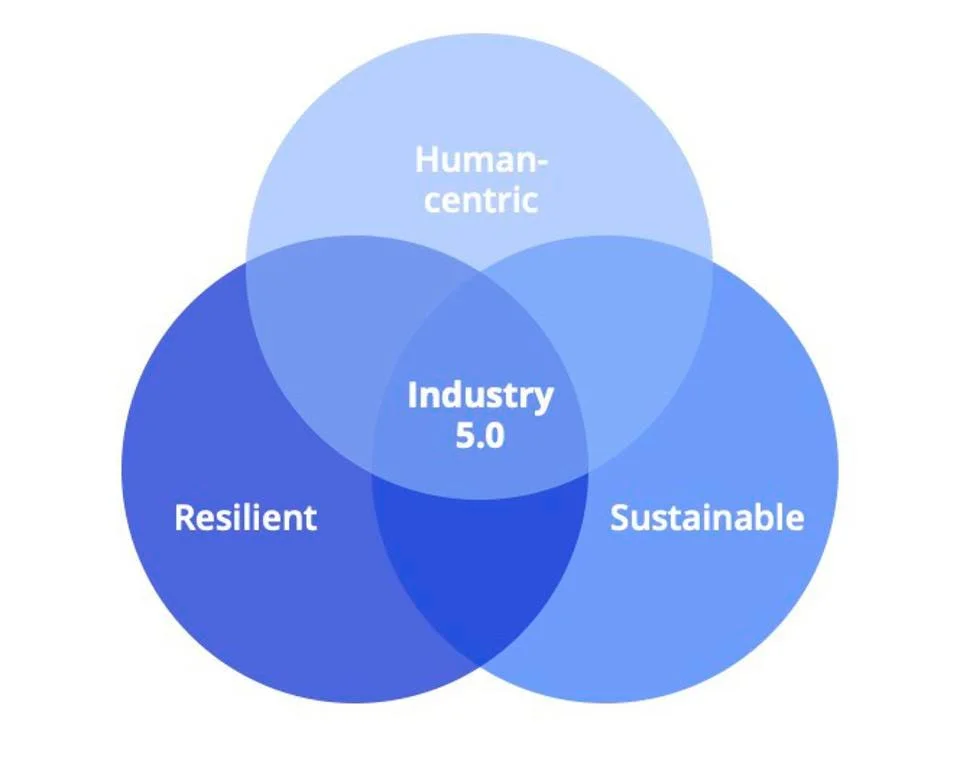
La Industria 5.0 se concibe como la próxima etapa en la evolución industrial, construyendo sobre los fundamentos de la Industria 4.0 (automatización, digitalización e interconexión) pero con un enfoque humano y sostenible. En lugar de centrarse exclusivamente en la eficiencia, la Industria 5.0 busca un equilibrio entre productividad, bienestar humano y cuidado del medio ambiente. Esta nueva visión incluye objetivos clave, como la mejora de procesos productivos, la optimización de recursos y la creación de fábricas más flexibles y adaptables, que puedan personalizar productos según las necesidades específicas de cada cliente.
¿Por qué es importante?
La Industria 5.0 no solo representa una mejora tecnológica, sino también un cambio cultural y filosófico en la forma en que entendemos la producción. La incorporación de máquinas avanzadas, combinada con la creatividad y el juicio humano, promete una industria más eficiente, sostenible y capaz de adaptarse a los desafíos globales. Además, al reducir los residuos y optimizar el uso de recursos, la Industria 5.0 contribuye directamente a mitigar el impacto ambiental, alineándose con los objetivos globales de sostenibilidad.
¿Cuáles son sus objetivos principales?
La Industria 5.0 busca combinar tecnología avanzada y sostenibilidad para crear procesos más eficientes, reduciendo residuos y optimizando recursos desde el inicio.
Interoperabilidad e integración: La clave es la colaboración eficiente entre sistemas de hardware y software, facilitada por tecnologías como el Manufacturing as a Service (producción como servicio), que permiten gestionar procesos sin conocimientos especializados, mejorando la adaptabilidad.
Generación de capital intelectual: Impulsa la competitividad mediante el desarrollo de nuevas tecnologías y la protección de innovaciones que surjan en un entorno colaborativo de investigación y desarrollo.
Flexibilidad y personalización: Implementación de sistemas reconfigurables que permiten cambios rápidos entre diferentes productos o adaptarse a pedidos personalizados, lo que responde a las crecientes demandas de los consumidores por productos hechos a medida.
El proyecto está en el corazón de la evolución hacia una industria más inclusiva y responsable. Impulsado por los principios de la Industria 5.0, busca reimaginar los procesos industriales, integrando de forma armónica tecnologías avanzadas como la inteligencia artificial y la automatización inteligente, con un fuerte compromiso hacia el bienestar social y la sostenibilidad.
¿Qué Puedes Hacer con Nuestra App?
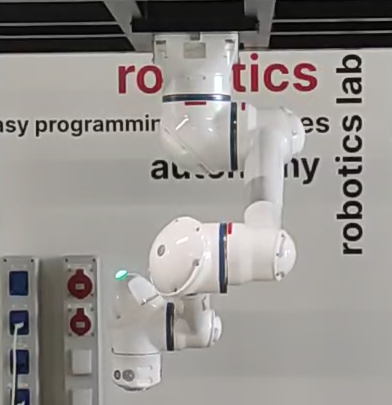
Nuestra aplicación permite el control remoto de un brazo robótico de
la marca Yaskawa, utilizando la plataforma ROS para
comunicar y enviar comandos al robot de maneraf eficiente. El brazo
robótico Yaskawa es conocido por su precisión y rendimiento en tareas
industriales. A través de esta aplicación, es posible controlarlo
desde una interfaz sencilla, habilitando su uso en diversas
aplicaciones, como soldadura, ensamblaje y manipulación de objetos en
entornos automatizados.
Además, la aplicación está diseñada para ser intuitiva y fácil de
usar, permitiendo a los operadores realizar tareas complejas con un
mínimo de entrenamiento. Gracias a ROS, podemos implementar funciones
avanzadas como la planificación de trayectorias y la detección de
colisiones.
Demostración del control del brazo robótico Yaskawa.
¿Cómo utilizar la app?
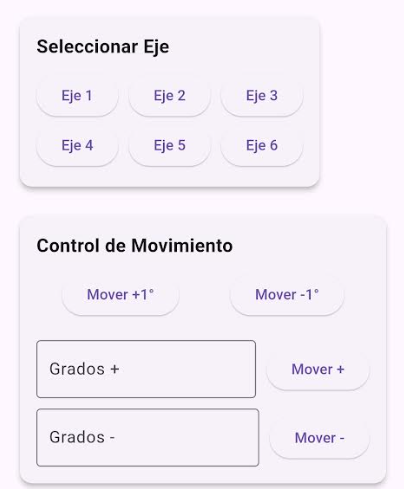
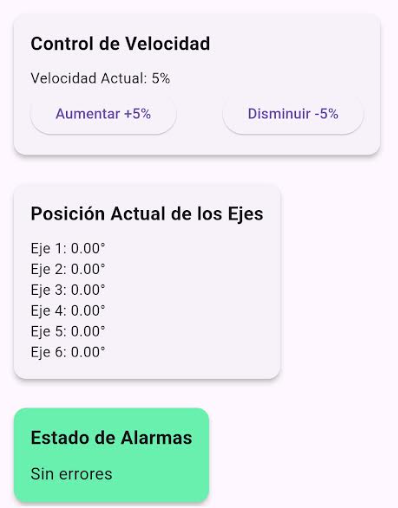
Interfaz de Control
La interfaz de control permite a los usuarios interactuar de forma
intuitiva con el brazo robótico, proporcionando un fácil acceso a todas
las funciones y configuraciones necesarias.
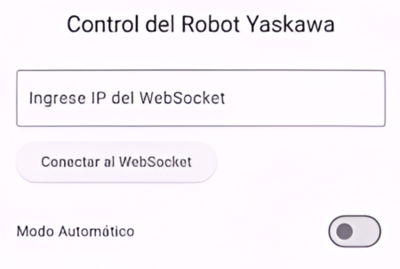
Conexión a través de IP y Simulación con RViz
Para que el brazo robótico Yaskawa funcione correctamente desde tu
dispositivo móvil, es fundamental conectarse a la misma red local que
el ordenador que ejecutará la aplicación. Sigue estos pasos para
establecer la conexión:
1. Obtener la dirección IP del ordenador: Antes de comenzar, asegúrate de conocer la dirección IP del ordenador y de la controladora a la que deseas conectarte...
2. Introducir la IP en el dispositivo móvil: En la aplicación para controlar el brazo robótico, necesitarás ingresar la dirección IP que obtuviste en el paso anterior...
3. Conectar dispositivos a la misma red: Asegúrate de que tanto tu dispositivo móvil como el ordenador y la controladora estén conectados a la misma red Wi-Fi...
4. Conectar PC y controladora: Como se ha hecho en el paso anterior con el ordenador y el móvil, ahora debes hacer la conexión entre el PC y la controladora mediante cables LAN...
5. Comenzar a mover: Una vez que hayas realizado todos los pasos anteriores de manera satisfactoria, deberías poder enviar una acción desde el móvil...
Modo Automático
El modo automático es una funcionalidad que facilita la operación del
brazo robótico mediante el uso de un archivo CSV que contiene
coordenadas predefinidas.
1. Creación del archivo CSV: En este modo, el usuario puede crear un archivo CSV que contenga una lista de coordenadas que el brazo robótico debe seguir...
2. Seguimiento Automatizado: Una vez que el archivo CSV está creado y cargado en el sistema, el brazo robótico podrá seguir automáticamente las coordenadas especificadas en el archivo...
Este modo es especialmente útil en entornos de producción o tareas
repetitivas, donde se requieren movimientos precisos y consistentes del
brazo robótico, como en procesos de ensamblaje o manipulación de objetos.
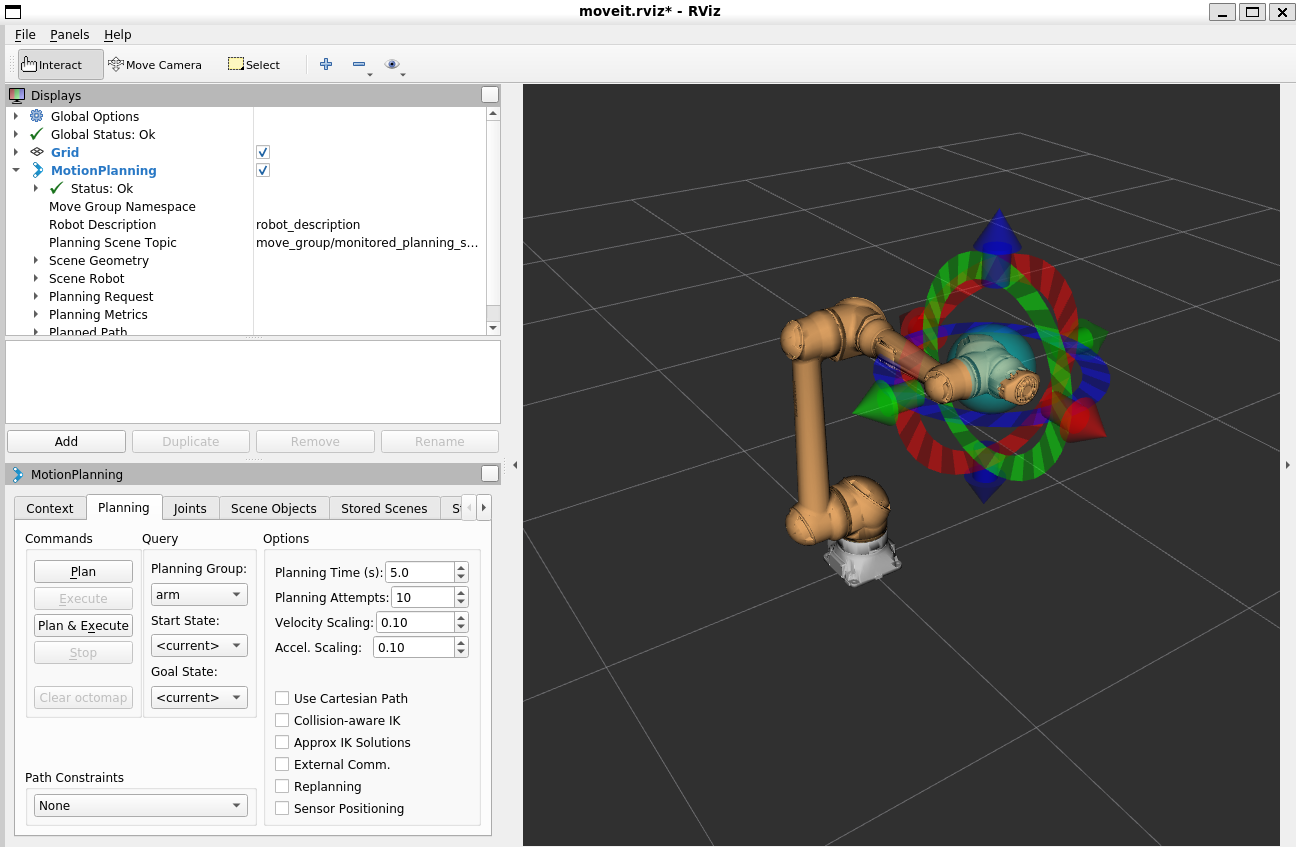
Simulación en Tiempo Real
La simulación en tiempo real permite visualizar el comportamiento del brazo
robótico en diferentes escenarios, lo que facilita la programación y prueba
de trayectorias.
Instalación de la App
La guía de instalación proporciona al usuario un proceso paso a paso para
asegurar la correcta configuración de la aplicación en su dispositivo...
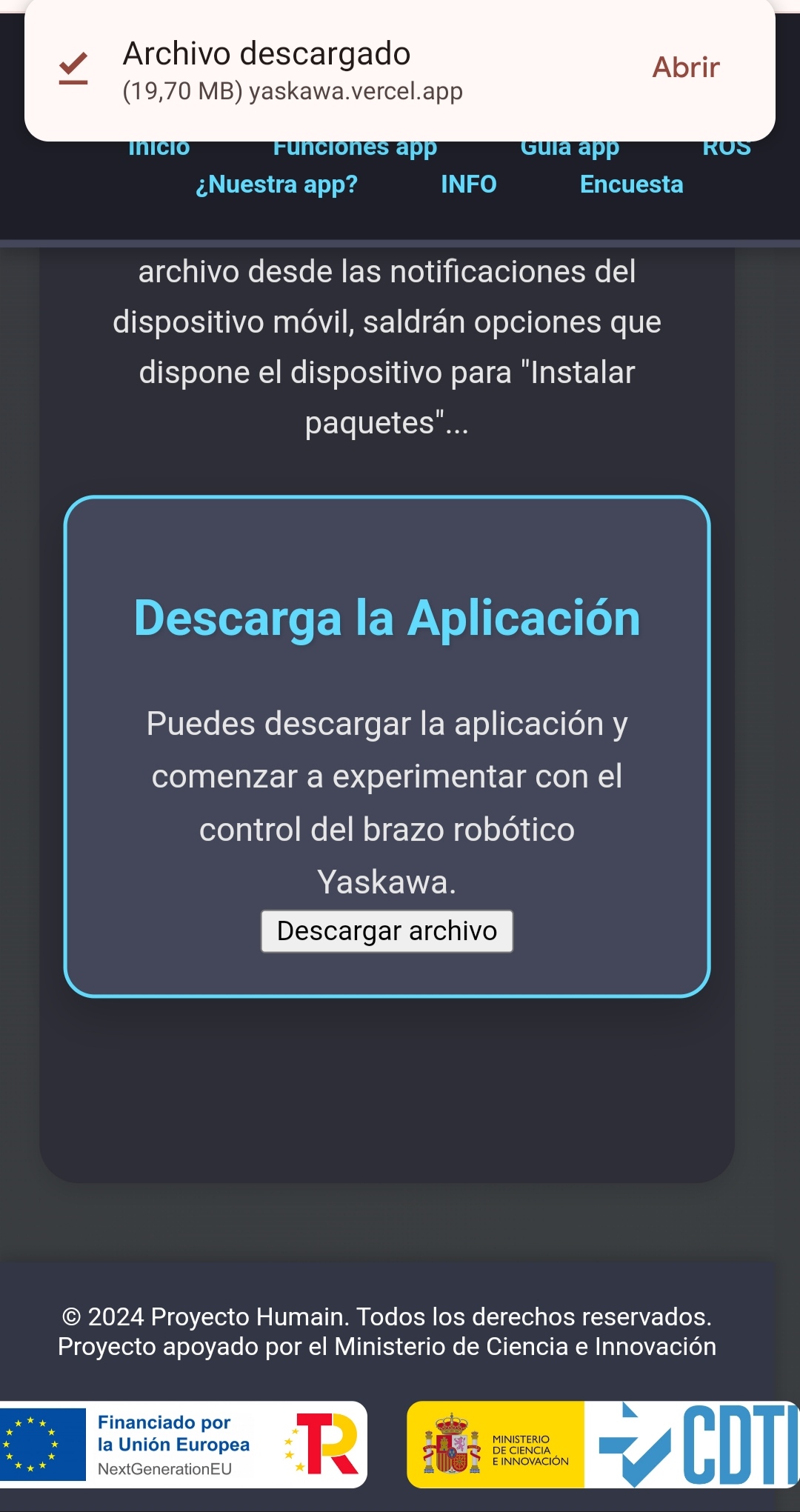
El primer paso es dirigirse al botón de "Descargar archivo" que contiene el
.apk para instalar la app.
Una vez hecho el primer paso, debemos esperar a que se descargue y entonces
la descarga aparecerá completada en las notificaciones.
Entonces, una vez seleccionado el archivo desde las notificaciones del
dispositivo móvil, saldrán varias opciones que dispone el dispositivo para realizar la instalación, normalmente se utilizará: "Instalador de paquetes"
Descarga la Aplicación
Puedes descargar la aplicación y comenzar a experimentar con el control del
brazo robótico Yaskawa.
Iniciar Nodo ROS
Para iniciar correctamente, hemos preparado una serie de pasos que te
guiarán en todo lo necesario para poner en marcha tu nuevo proyecto.
Estos pasos están diseñados para facilitar un arranque eficiente y bien
estructurado, asegurando que dispongas de las herramientas y
conocimientos fundamentales para abordar cada etapa.
Pasos para utilizar la app en el Robot:
1. El primer paso es tener el archivo
yaskawa_control, que permitirá llevar a cabo el proceso descrito
a continuación.
2. Ejecuta los siguientes comandos en la terminal
[¡¡Recuerda!!] Docker debe estar abierto:
El siguiente código sirve para copiar la carpeta para el funcionamiento de todas las características de la app
Y ahora este comando será para poder construirlo en Docker
docker compose up -d --build
Ahora para poder empezar a trabajar ejecutamos el inicio del "contenedor".
docker start nombre_contenedor
Seguidamente, ejecuta:
docker exec -it nombre_contenedor bash
El siguiente comando carga en el entorno actual de la terminal todas las
configuraciones y variables de entorno necesarias para trabajar con ROS
Noetic:
source /opt/ros/noetic/setup.bash
Asegúrate de que estás dentro de la carpeta catkin_ws y utiliza:
catkin_make
El siguiente comando carga en el entorno actual de la terminal las
configuraciones específicas del espacio de trabajo que ha sido compilado
en la carpeta devel:
source devel/setup.bash
Una vez realizados los pasos anteriores, deberemos ejecutar la siguiente
línea de código que permite conectarse a la controladora
yrc1000 y al robot que tiene su propia IP.
El primer paso para activar al robot será establecer una comunicación
que permita enviar solicitudes y recibir respuestas, lo que resultará
útil para tareas que no son recurrentes, como por ejemplo activar o
desactivar una función específica.
rosservice call /robot_enable
Y ahora debemos establecer la base de funcionamiento para el traspaso de
información.
rosrun motoman_hc10_support axis_selector_csv.py
Y seguidamente debemos habilitar la posibilidad de conectar el
dispositivo móvil al ordenador que está ejecutando el programa que
comunica con el robot.
Los siguientes pasos te permitirán establecer una conexión entre tu
ordenador y un dispositivo móvil.
Primero, es importante asegurarse de que tienes instalado lsof,
ya que es necesario para ejecutar los procesos descritos a continuación.
Para asegurarnos de que está instalado, utiliza el siguiente código para
instalarlo o revisar si está instalado:
apt-get update && apt-get install lsof
Si tienes lsof, entonces deberemos ejecutar el siguiente código, que
sirve para iniciar las conexiones:
Lo que nos interesa es el PID, que en este caso es 76. Sin
embargo, este valor puede variar según el usuario. El código que debemos
utilizar debería ser similar a este:
Una vez ejecutado ya deberías poder conectarte satisfactoriamente del
móvil al ordenador añadiendo en la app la IP correcta (la del
ordenador).
¿Realmente es Diferente?
La programación de GPA destaca por su simplicidad y facilidad de uso, ofreciendo una interfaz intuitiva que facilita un desarrollo más rápido y eficiente en comparación con el software de la competencia. Esta accesibilidad reduce considerablemente la necesidad de conocimientos avanzados o experiencia técnica especializada, permitiendo que usuarios con una base técnica intermedia puedan trabajar de manera eficaz y sin complicaciones. Así, el software de GPA no solo optimiza el tiempo de desarrollo, sino que también democratiza el acceso a herramientas avanzadas, haciéndolas más accesibles y prácticas que otras alternativas en el mercado.
Presupuesto
Título: Investigación de nuevas soluciones flexibles basada en patrones de IA e IOT para una producción 5.0 más segura, eficiente y sostenible.
Centro tecnológico enfocado en la investigación y el desarrollo de soluciones innovadoras en materiales, procesos industriales y sostenibilidad.
Se especializa en el diseño e implementación de proyectos tecnológicos innovadores, desarrollando soluciones y productos para el sector metalúrgico, abarcando sectores como el sanitario, automotriz y aeronáutico.
Desarrolla soluciones para automatizar procesos basados en inputs visuales utilizando Inteligencia Artificial, Visión por Computador y Robótica, con un enfoque en el sector industrial.
Esta compañía es experta en automatización industrial para la industria del automóvil, cubriendo ingeniería, fabricación, montaje y mantenimiento, con un fuerte enfoque en la innovación y el compromiso medioambiental.
Desarrolla soluciones basadas en IoT e IA, ofreciendo servicios en la nube para sectores como la industria 4.0, eficiencia energética y Ambient Assisted Living (AAL).
Desarrolla soluciones en ingeniería de comunicaciones, control e inteligencia de señal para los sectores aeroespacial, defensa, emergencias, seguridad y telecomunicaciones.
Implementa tecnologías avanzadas para ofrecer soluciones en energía, alimentación, industria, construcción, salud y medioambiente, mejorando la sostenibilidad y eficiencia en diversos sectores.
Encuestas
A continuación, encontrarás las encuestas relacionadas con la evaluación y mejora de nuestra plataforma. Tu opinión es clave.
Encuesta 1
Evaluación Técnica de la Plataforma
Objetivo: Recopilar información sobre el desempeño técnico y las capacidades específicas de la plataforma.